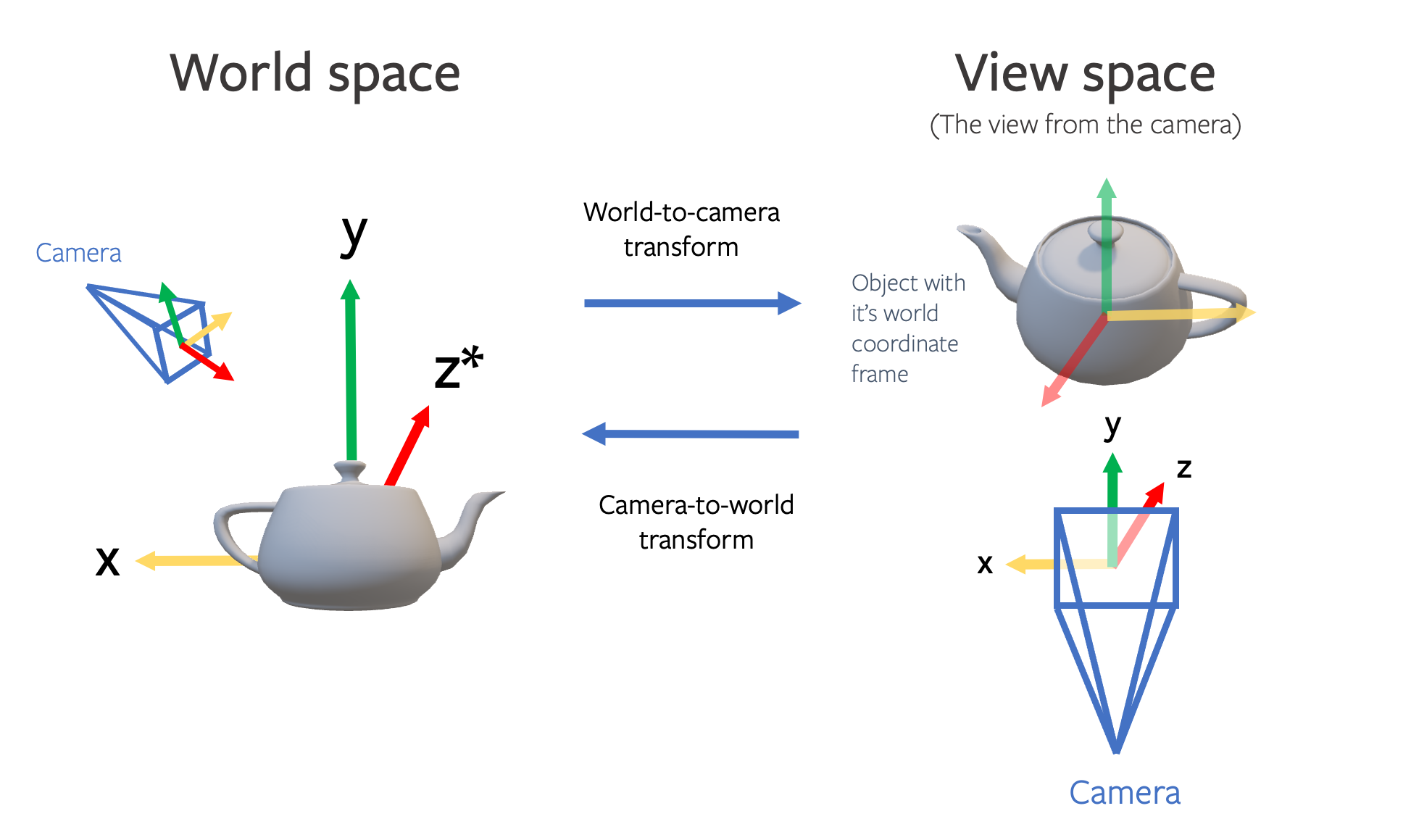
Converting Camera Conventions
When working with computer vision models we frequently need to know information about the camera that was used to generate the image. This includes information about the position of the camera in the world coordinate system as well as the intrinsic properties of the camera such as the focal length.
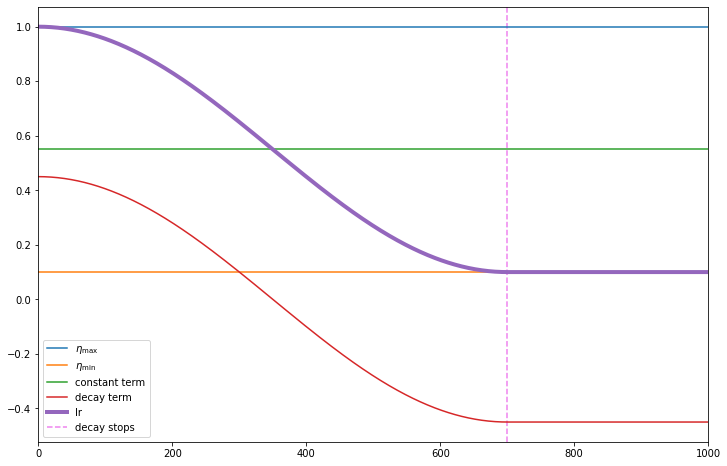
Cosine Learning Rate Decay
In this post we will introduce the key hyperparameters involved in cosine decay and take a look at how the decay part can be achieved in TensorFlow and PyTorch. In a subsequent blog we will look at how to add restarts.
Plotting bounding boxes for object detection
When working with detection models in a pipeline you often need to visualize the bounding boxes to sanity check the predictions. Bounding boxes can be defined in different ways so this is also useful to confirm the convention being used.

Padding in PyTorch and TensorFlow embedding layers
When batching inputs for sequence models you often have sequences of variable sizes and you need to pad some of the inputs so that you can input them as a single tensor. For example here is a pair of lines in a dialogue from Twelfth Night Act 2, Scene 4 which are of variable length as represented here

However you don’t want the pad locations to influence the weight updates. In this post we will learn how PyTorch and TensorFlow approach this via their respective embedding layers.